Let's continue examining jack_delay—I was curious, whether the method used by jack_delay is described anywhere. I tried looking for delay measurement methods used for "satellite ranging" (mentioned in README file), but it seems that modern GPS satellites use just a couple of frequencies, and effectively transmit binary sequences.
So I emailed Fons Adriaensen, the author of jack_delay, and he was very kind to provide more details. He told me that the algorithm was used about 30 years ago, and current methods used for satellite ranging are indeed different. Fons also described the algorithm in a more generic form. Later, I've found similar descriptions in books on radars. I decided to provide the algorithm description here.
I would start with a more generic version of the approach, as described by Fons and later discovered by myself in this paper by J. Clarke. Let Fb be the "base frequency" which defines the minimum step of measurement. We use N frequencies Fi each of them is defined as an exact integer multiple of Fb: Fi = Mi * Fb, where all Mi are larger than 1, and are pairwise coprime (that is, for any j and k from [1, N], j ≠ k: Mj > 1 ^ GCD(Mj, Mk) = 1). In this case, the sum of sine waves of frequencies Fi is also a periodic function with the period of ∏i = 1..N Mi * Fb, and the position within this composite period can be calculated by considering the current phase of each sine wave. This is basically what Chinese reminder theorem is about.
To illustrate this idea, let's consider two sequences: one with period 3 (going 0, 1, 2), another with period 4 (going 0, 1, 2, 3):
| Result | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 0 | ... |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Seq 1 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | ... |
| Seq 2 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | ... |
As we can see, the pairs comprised from numbers of these two sequences form a third sequence that starts repeating itself after 12 iterations (3 * 4). Thus, if someone provides us with a pair of corresponding numbers from the first two sequences, say (0, 2), we can unambiguously find their position in the composite sequence, which is 6.
This is how the position can be calculated. Let's denote our periods 3 and 4 as m1 and m2. And the given numbers (0 and 2) as a1 and a2. The number that we are looking for is equivalent to a1 modulo m1, and to a2 modulo m2:
x ≡ a1 (mod m1) ≡ a2 (mod m2).
Finding the position inside the composite sequence automatically requires finding numbers b1 and b2 first, such as m2 * b1 ≡ 1 (mod m1), and m1 * b2 ≡ 1 (mod m2). These numbers do exist because 3 and 4 are coprime. It's easy to see that b1 is 1, and b2 is 3:
| Result | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 0 | ... |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Seq 1 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | ... |
| Seq 2 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | ... |
The position is then calculated as a sum modulo m1 * m2:
[m2 * b1 * a1 + m1 * b2 * a2] (mod m1 * m2) = [4 * 1 * 0 + 3 * 3 * 2] (mod 12) = (0 + 18) (mod 12) = 6.
When using multiple frequencies, the classical approach would require us to perform the derivation of the delay in a single step for all frequencies, as J. Clarke's paper illustrates.
However, as we have seen in my previous post, jack_delay uses a loop where it considers the phase of each minor sine wave separately against previously calculated yet still incomplete delay value. The algorithm uses real (floating point) numbers for representing the current delay value, and the phase of the current sine wave. But it later transforms the result into an integer number, thus we can enumerate intervals of the real functions, and work with integers instead.
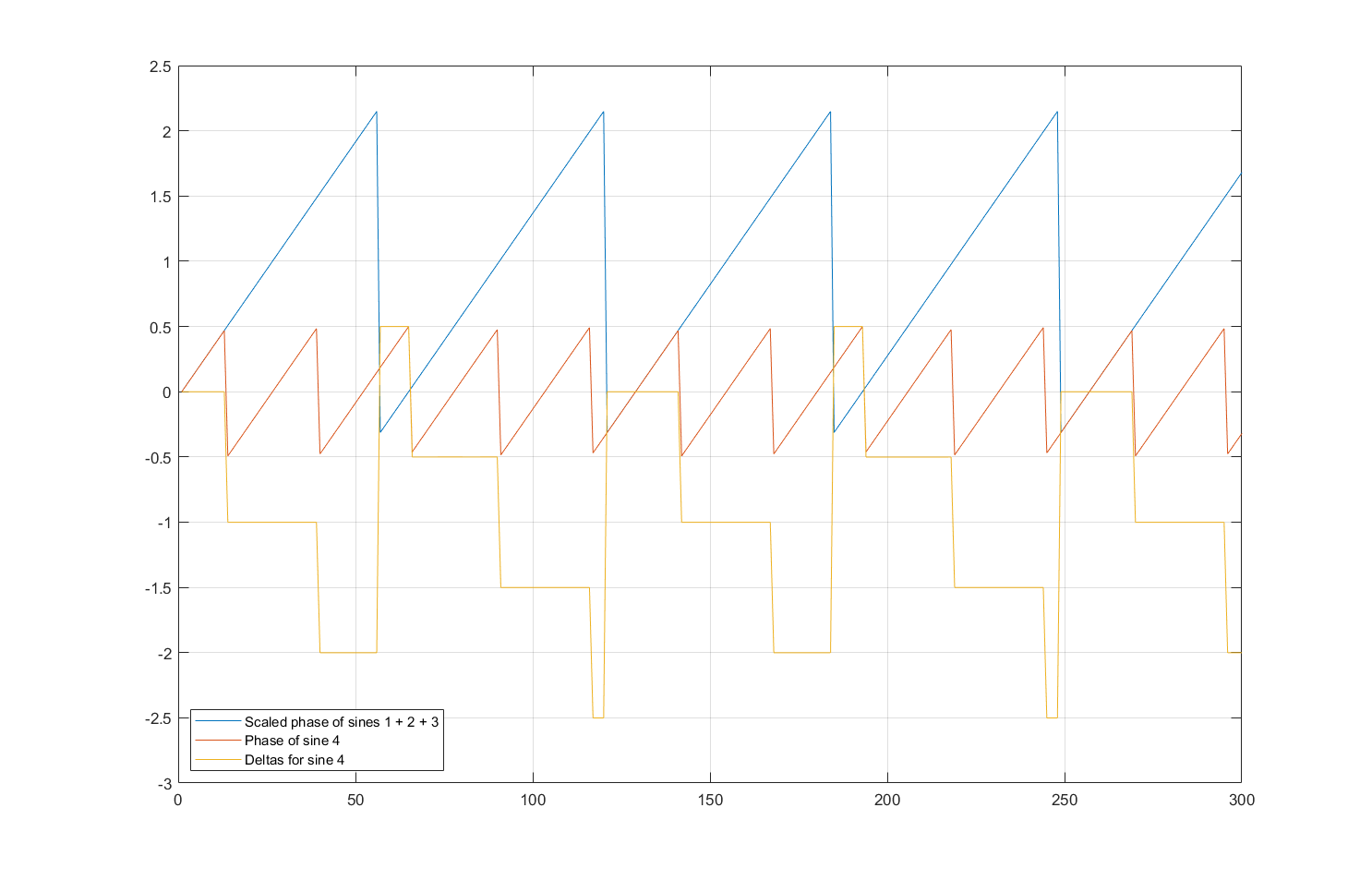
If we consider 0.5 as an unit on the Y scale then the scaled delay, having a range of 2.5, maps into a sequence of 2.5 / 0.5 = 5 integers: from 0 to 4 (A). And the current sine wave phase, having a range of 1, maps into a binary sequence (B). And because the sequence A has an odd number of elements, its parity flips when the sequence is restarted:
| (B - A) mod 2 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|
| A | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 2 | 3 | 4 |
| B | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
This is exactly how jack_delay creates a square wave with the period length of A * 2. Thus, we now have exact requirements for the coefficient used for the current delay scaling. Considering that the current delay is in range of 2 ** N, multiplying by the coefficient must yield an odd number multiplied by 1 / 2. Thus, the coefficient can be expressed as: M / 2 ** (N + 1), where M is any odd number. Since the coefficient is calculated via dividing the current frequency by the base frequency, the formula for minor frequency's value is:
M / (2 ** (N + 1) * f0)
Recall that f0 is 4096 and the values for N start with 4. This is basically the same conclusion we have made in the previous post, but now the requirements for the values of M are fully understood, and the underlying mathematical principle for determining the delay is explained.
Resilience to Channel Problems
Since the algorithm depends on uniform signal phase propagation, anything that affects the phase of the signal in a non-uniform way affects the outcome of the measurements using this method. On the other hand, a lot of other issues in the transmission channel have no effect.
- DC offset of the signal—has no effect since it doesn't affect the phase.
- Noise—adds random fluctuations to the phase, but since a) the algorithm uses a low pass filter for the frequency domain values, and b) it has error checks for gross fluctuations, noise does not affect the results.
- Clipping of the signal—clipping creates additional harmonics, but since the algorithm only uses the value of the main harmonic, these additional harmonics are left out ignored.
- Echoes—delaying the signal and adding it to the source creates an effect of a comb filter. It reduces or amplifies some frequency components of the test signal, but doesn't change their phases, thus it also does not affect the delay calculation.
- Non-uniform group delay—is the only thing that this method is sensitive to. Unfortunately, this is what frequently happens in acoustic measurements, due to different filters used. However, it could be compensated by applying an inverse filter first. It will be interesting to try this approach for measuring notoriously non-linear acoustic devices—subwoofers.